
This article is part of the Circuits thread, an experimental format collecting invited short articles and critical commentary delving into the inner workings of neural networks.
Curve Detectors High-Low Frequency DetectorsConvolutional neural networks contain a hidden world of symmetries within themselves. This symmetry is a powerful tool in understanding the features and circuits inside neural networks. It also suggests that efforts to design neural networks with additional symmetries baked in (eg.
To see these symmetries, we need to look at the individual neurons inside convolutional neural networks and the circuits that connect them.
It turns out that many neurons are slightly transformed versions of the same basic feature.
This includes rotated copies of the same feature, scaled copies, flipped copies, features detecting different colors, and much more.
We sometimes call this phenomenon “equivariance,” since it means that switching the neurons is equivalent to transforming the input.
Before we talk about the examples introduced in this article, let’s talk about how this definition maps to the classic example of equivariance in neural networks: translation and convolutional neural network nets. In a conv net, translating the input image is equivalent to translating the neurons in the hidden layers (ignoring pooling, striding, etc). Formally, and maps images to hidden layer activations. Then acts on the input image by translating spatially, and acts on the activations by also spatially translating them.
Now let’s consider the case of curve detectors (the first example in the Equivariant Features section), which have ten rotated copies. In this case, and maps a position at an image to a ten dimensional vector describing how much each curve detector fires. Then acts on the input image by rotating it around that position and acts on the hidden layers by reorganizing the neurons so that their orientations correspond to the appropriate rotations. This satisfies, at least approximately, the original definition of equivariance.
This transformed neuron form of equivariance is a special case of equivariance. There are many ways a neural network could be equivariant without having transformed versions of neurons. Conversely, we’ll also see a number of examples of equivariance that don’t map exactly to the group theory definition of equivariance: some have “holes” where a transformed neuron is missing, while others consist of a set of transformations that have a weaker structure than a group or don’t correspond to a simple action on the image. But this general structure remains.
Equivariance can be seen as a kind of ”circuit
motif,” an abstract recurring pattern across circuits analogous to motifs in systems biology
In this article, we’ll focus on examples of equivariance in InceptionV1
Equivariant Features
Rotational Equivariance: One example of equivariance is rotated versions of the same feature. These are especially common in early vision, for example curve detectors, high-low frequency detectors, and line detectors.
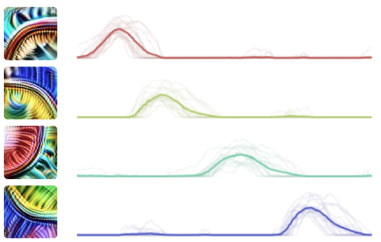
One can test that these are genuinely rotated versions of the same feature by taking examples that cause one to fire, rotating them, and checking that the others fire as expected. The article on curve detectors tests their equivariance through several experiments, including rotating stimuli that activate one neuron and seeing how the others respond.
Scale Equivariance: Rotated versions aren’t the only kind of variation we see. It’s also quite common to see the same feature at different scales, although usually the scaled features occur at different layers. For example, we see circle detectors across a huge variety of scales, with the small ones in early layers and the large ones in later layers.
Hue Equivariance: For color-detecting features, we often see variants detecting the same thing in different hues. For example, color center-surround units will detect one hue in the center, and the opposing hue on around it. Units can be found doing this up until the seventh or even eighth layer of InceptionV1.
Hue-Rotation Equivariance: In early vision, we very often see color contrast units. These units detect one hue on one side, and the opposite hue on the other. As a result, they have variation in both hue and rotation. These variations are particularly interesting, because there’s an interaction between hue and rotation. But cycling hue by 180 degrees flips which hue is on which side, and is so is equivalent to rotating by 180 degrees.
In the following diagram, we show orientation rotating the whole 360 degrees, but hue only rotating 180. At the bottom of the chart, it wraps around to the top but shifts by 180 degrees.
Reflection Equivariance: As we move into the mid layers of the network, rotated variations become less prominent, but horizontally flipped pairs become quite prevalent.
Miscellaneous Equivariance: Finally, we see variations of features transformed in other miscellaneous ways. For example, short vs long-snouted versions of the same dog head features, or human vs dog versions of the same feature. We even see units which are equivariant to camera perspective (found in a Places365
Equivariant Circuits
The equivariant behavior we observe in neurons is really a reflection of a deeper symmetry that exists in the weights of neural networks and the circuits they form.
We’ll start by focusing on rotationally equivariant features that are formed from rotationally invariant features. This “invariant→equivariant” case is probably the simplest form of equivariant circuit. Next, we’ll look at “equivariant→invariant” circuits, and then finally the more complex “equivariant→equivariant” circuits.
High-Low Circuit: In the following example, we see high-low frequency detectors get built from a high-frequency factor and a low-frequency factor (both factors correspond to a combination of neurons in the previous layer). Each high-low frequency detector responds to a transition in frequency in a given direction, detecting high-frequency patterns on one side, and low frequency patterns on the other. Notice how the same weight pattern rotates, making rotated versions of the feature.
Contrast→Center Circuit: This same pattern can be used in reverse to turn rotationally equivariant features back into rotationally invariant features (an “equivariant→invariant” circuit). In the following example, we see several green-purple color contrast detectors get combined to create green-purple and purple-green center-surround detectors. Compare the weights in this circuit to the ones in the previous one. It’s literally the same weight pattern transposed.
Sometimes we see one of these immediately follow the other: equivariance be created, and then immediately partially used to create invariant units.
BW-Color Circuit: In the following example, a generic color factor and a black and white factor are used to create black and white vs color features. Later, the black and white vs color features are combined to create units which detect black and white at the center, but color around, or vice versa.
Line→Circle/Divergence Circuit: Another example of equivariant features being combined to create invariant features is very early line-like complex Gabor detectors being combined to create a small circle unit and diverging lines unit.
Curve→Circle/Evolute Circuit: For a more complex example of rotational equivariance being combined to create invariant units, we can look at curve detectors being combined to create circle and evolute detectors. This circuit is also an example of scale equivariance. The same general pattern which turns small curve detectors into a small circle detector turns large curve detectors into a large circle detector. The same pattern which turns medium curve detectors into a medium evolute detector turns large curves into a large evolute detector.
Human-Animal Circuit: So far, all of the examples we’ve seen of circuits have involved rotation. These human-animal and animal-human detectors are an example of horizontal flip equivariance instead:
Invariant Dog Head Circuit: Conversely, this example (part of the broader oriented dog head circuit) shows left and right oriented dog heads get combined into a pose invariant dog head detector. Notice how the weights flip.
“Equivariant→Equivariant” Circuits
The circuits we’ve looked at so far were either “invariant→equivariant” or “equivariant→invariant.” Either they had invariant input units, or invariant output units. Circuits of this form are quite simple: the weights rotate, or flip, or otherwise transform, but only in response to the transformation of a single feature. When we look at “equivariant→equivariant” circuits, things become a bit more complex. Both the input and output features transform, and we need to consider the relative relationship between the two units.
Hue→Hue Circuit: Let’s start with a circuit connecting two sets of hue-equivariant center-surround detectors. Each unit in the second layer is excited by the unit selecting for a similar hue in the previous layer.
To understand the above, we need to focus on the relative relationships between each input and output neuron — in this case, how far the hues are apart on the color wheel. When they have the same hue, the relationship is excitatory. When they have close but different hues, it’s inhibitory. And when they are very different, the weight is close to zero.
Curve→Curve Circuit: Let’s now consider a slightly more complex example, how early curve detectors connect to late curve detectors. We’ll focus on four curve detectors that are 90 degrees rotated from each other.
If we just look at the matrix of weights, it’s a bit hard to understand. But if we focus on how each curve detector connects to the earlier curve in the same and opposite orientations, it becomes easier to see the structure. Rather than each curve being built from the same neurons in the previous layer, they shift. Each curve is excited by curves in the same orientation and inhibited by those in the opposite. At the same time, the spatial structure of the weights also rotate.
Contrast→Line Circuit: For a yet more complex example, let’s look at how color contrast detectors connect to line detectors. The general idea is line detectors should fire more strongly if there are different colors on each side of the line. Conversely, they should be inhibited by a change in color if it is perpendicular to the line.
Note that this is an “equivariant→equivariant” circuit with respect to rotation, but “equivariant→invariant” with respect to hue.
Equivariant Architectures
Equivariance has a rich history in deep learning. Many important neural network architectures have equivariance at their core, and there is a very active thread of research around more aggressively incorporating equivariance. But the focus is normally on designing equivariant architectures, rather than “natural equivariance” we’ve discussed so far. How should we think about the relationship between “natural” and “designed” equivariance? As we’ll see, there appears to be quite a deep connection.
Historically, there has been some interesting back and forth between the two.
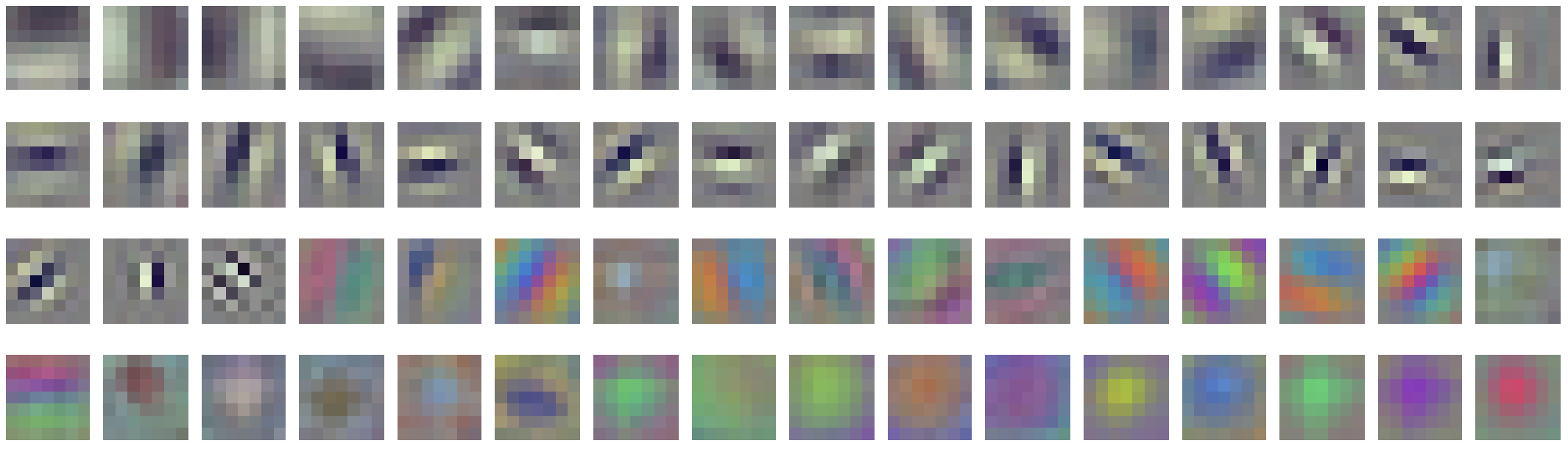
Researchers have often observed that many features in the first layer of neural networks are transformed versions of one basic template.
For example, if you train a fully-connected neural network on a visual task, the first layer will learn variants of the same features over and over: Gabor filters at different positions, orientations, and scales. Convolutional neural networks changed this. By baking the existence of translated copies of each feature directly into the network architecture, they generally remove the need for the network to learn translated copies of each feature. This resulted in a massive increase in statistical efficiency, and became a cornerstone of modern deep learning approaches to computer vision. But if we look at the first layer of a well-trained convolutional neural network, we see that other transformed versions of the same feature remain:
Inspired by this, a 2011 paper subtitled “One Gabor to Rule Them All”
… these more sophisticated equivariant networks make the weights between two neurons equal if they have the same relative relationship under more general transformations:
Group theory is an area of mathematics that gives us tools for describing symmetries and sets of interacting transformations. To build equivariant neural networks, we often borrow an idea from group theory called a group convolution. Just as a regular convolution can describe weights that correctly respect translational equivariance, a group convolution can describe weights that respect a complex set of interacting transformations (the group it operates over). Although you could try to work out how to tie the weights to achieve this from first principles, it’s easy to make mistakes. (One of the authors participated in many conversations with researchers in 2012 where people made errors on whiteboards about how sets of rotated and translated features should interact, without using convolutions.) Group convolutions can take any group you describe and give you the correct weight tying.
For an approachable introduction to group convolutions, we recommend this article.
If you dig further, you may begin to see papers discussing something called a group representation instead of group convolutions. This is a more advanced topic in group theory. The core idea is analogous to the Fourier transform. Recall that the Fourier transform turns convolution into pointwise multiplication (this is sometimes used to accelerate convolution). Well, the Fourier transform has a version that can operate over functions on groups, and also maps convolution to pointwise multiplication. And when you apply the Fourier transform to a group, the resulting coefficients correspond to something called a group representation, which you can think of as being analogous to a frequency in the regular Fourier transform.
This is, at least approximately, what we saw conv nets naturally doing when we look at equivariant circuits! The weights had symmetries that caused neurons with similar relationships to have similar weights, much like an equivariant architecture would force them to.
Given that we have neural network architectures which mimic the natural structures we observe, it seems natural to wonder what features and circuits such models learn. Do they learn the same equivariant features we see naturally form? Or do they do something entirely different?
To answer these questions, we trained an equivariant model roughly inspired by InceptionV1 on ImageNet. We made half the neurons rotationally equivariant
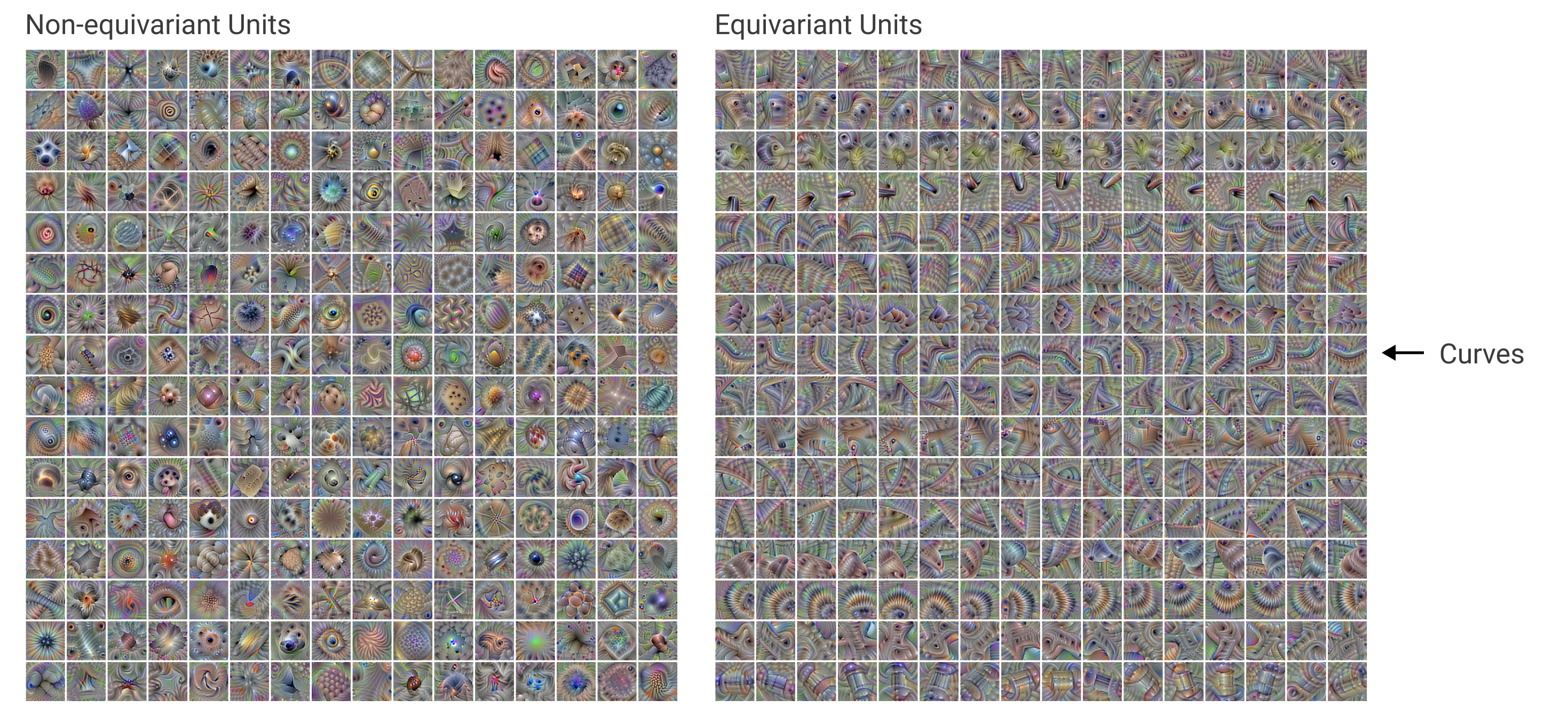
The existence of analogous features in equivariant models can be seen as a successful prediction of interpretability. As researchers engaged in more qualitative research, we should always be worried that we may be fooling ourselves. Successfully predicting which features will form in an equivariant neural network architecture is actually a pretty non-trivial prediction to make, and a nice confirmation that we’re correctly understanding things.
Another exciting possibility is that this kind of feature and circuit analysis may be able to help inform equivariance research. For example, the kinds of equivariance that naturally form might be helpful in informing what types of equivariance we should design into different layers of a neural network.
Conclusion
Equivariance has a remarkable ability to simplify our understanding of neural networks. When we see neural networks as families of features, interacting in structured ways, understanding small templates can actually turn into understanding how large numbers of neurons interact. Equivariance is a big help whenever we discover it.
We sometimes think of understanding neural networks as being like reverse engineering a regular computer program. In this analogy, equivariance is like finding the same inlined function repeated throughout the code. Once you realize that you’re seeing many copies of the same function, you only need to understand it once.
But natural equivariance does have some limitations. For starters, we have to find the equivariant families. This can actually take us quite a bit of work, poring through neurons. Further, they may not be exactly equivariant: one unit may be wired up slightly differently, or have a small exception, and so understanding it as equivariant could leave gaps in our understanding.
We’re excited about the potential of equivariant architectures to make the features and circuits of neural networks easier to understand. This seems especially promising in the context of early vision, where the vast majority of features seem to be equivariant to rotation, hue, scale, or a combination of those.
One of the biggest — and least discussed — advantages we have over neuroscientists in studying vision in artificial neural networks instead of biological neural networks is translational equivariance. By only having one neuron for each feature instead of tens of thousands of translated copies, convolutional neural networks massively reduce the complexity of studying artificial vision systems relative to biological ones. This has been a key ingredient in making it at all plausible that we can systematically understand InceptionV1.
Perhaps in the future, the right equivariant architecture will be able to shave another order of magnitude of complexity off of understanding early vision in neural networks. If so, understanding early vision might move from “possible with effort” to “easily achievable.”
This article is part of the Circuits thread, a collection of short articles and commentary by an open scientific collaboration delving into the inner workings of neural networks.